LEGO® #76181 Batmobile™: The Penguin™ Chase

When I first saw this set I wasn’t that impressed. Some of the product imagery on the LEGO store site wasn’t that inspiring and looked a little cartoony. Compared to the much bigger Technic version of the same vehicle from the 2022 The Batman movie, this seemed to be aimed at a much younger audience (the set is rated 8+) which is odd given that the film is another dark and gritty version of the dark knight detective. (Full disclosure - I haven’t actually seen the movie yet).



Colour comes in the form of translucent cyan flames (of which you get more than is actually used in the model) and further detailing is provided by stickers (e.g on the top roof panel). As usual, it is worth taking your time to carefully apply these stickers straight, using tweezers if you’ve got thick fingers like me.
A sticker also provides a neat control in the cockpit, which is roomy enough to make inserting and extracting the driver fairly easy, even one wearing a cape.

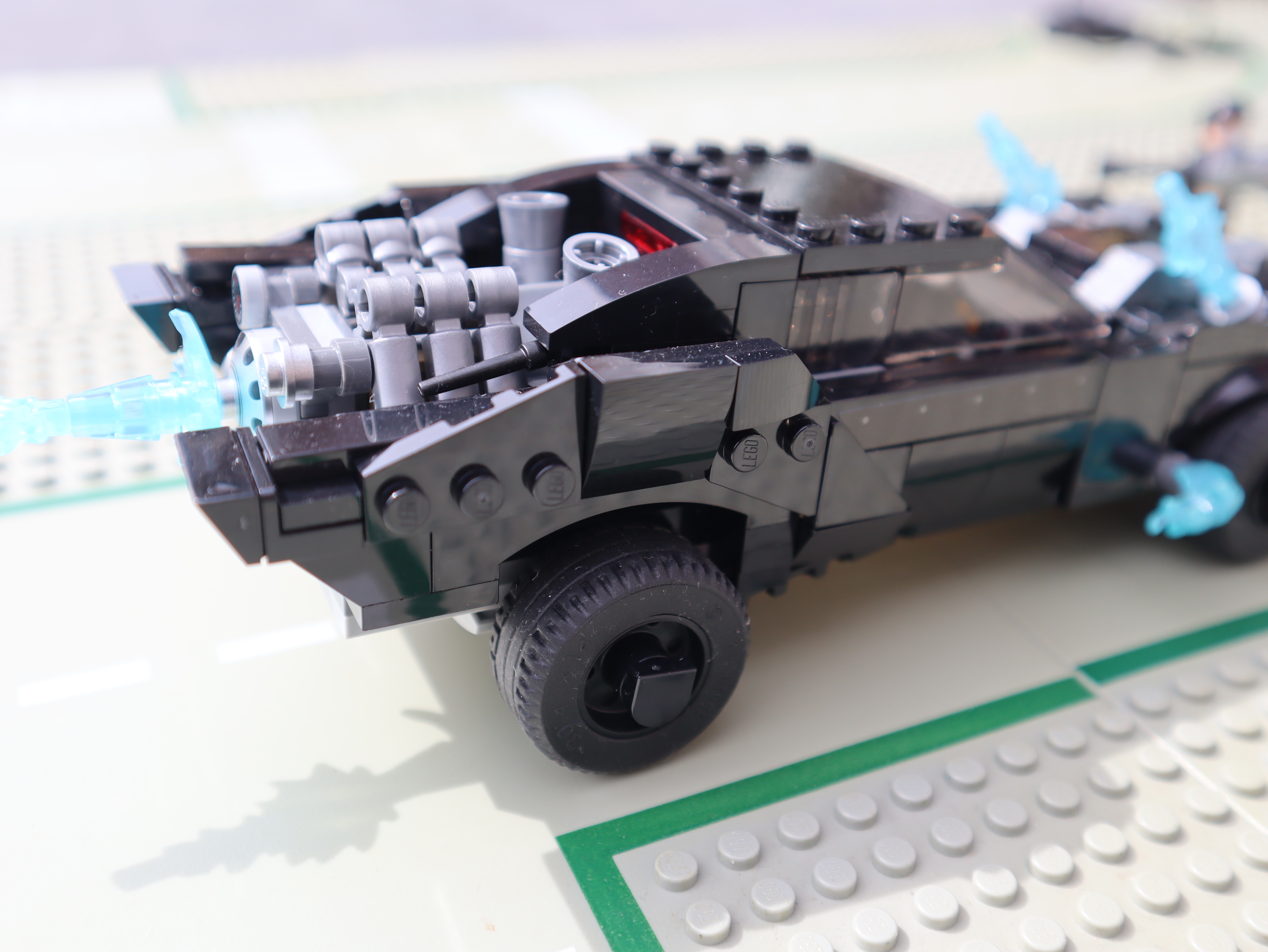
And the gauge at the back of the engine is a nice little touch too (this is not a sticker).

Weaponry come from 2 javelin missiles set in the front radiator which are launched by pressing the switches in the centre of the bonnet.

The Batman minifigure is decent, with a smug crooked smile expression which I like. The Penguin minifig doesn’t look much like a penguin to me, but as I said, I haven’t seen the movie yet. I’m also not sure how much of a “chase” it would be without the villain having a vehicle of his own, but I think I prefer the recent trend of just supplying a nemesis minifig with the Bat-vehicle, and not dreaming up a penguin-mobile (or whatever) which bumps up the cost of the set. He does have a really big gun though!


































